


Accueil > Nos actions > Journal de Bord des Opérations > Vacances Scientifiques > séjour SPIP session du 5 au 19 aout 2012 dans le Vercors
Le Journal de Bord
Dimanche 5 aout 2012
Arrivée sur le centre ! Après une petite session découverte du nouveau centre nous avons pris place dans nos studios et place au repas !
Ce soir nous avons fait une veillée sympas pour apprendre à se connaître avec le jeu « Aimes tu tes voisins ? ».
Cela consistait à choisir de nouveau voisins parmi la ronde de jeunes qui eux devaient se déplacer rapidement pour ne pas rester au milieu...
Lundi 6 aout 2012
Après une explication du programme de recherche concernant le piège photo nous avons tenté de relever un défi ! Il fallait configurer la carte arduino afin quelle puisse commander l’allumage de plusieurs LEDs. Le défis fût un succès car nous avons même réussi à programmer l’affichage du message « Bienvenue les SPIPs » sur un écran LCD...
...ça y est nos neurotransmetteurs sont tout excités et ne demandent qu’à être sollicités pour le projet du montage électronique destiné à faire fonctionner le piège photo ! Prochaine étape : Configuration de tout les autres modules...
Ce soir nous avons fait une veillée ambassadeur puis amnésia !!!
Mardi 7 aout 2012
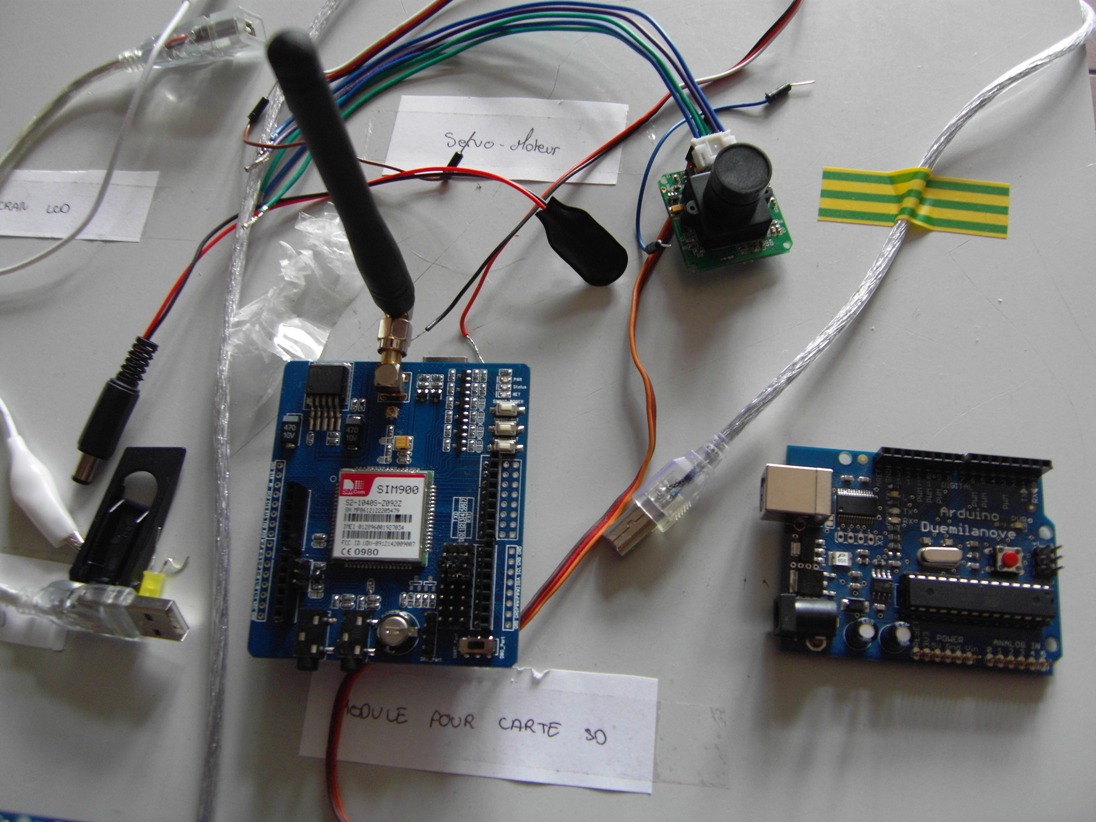
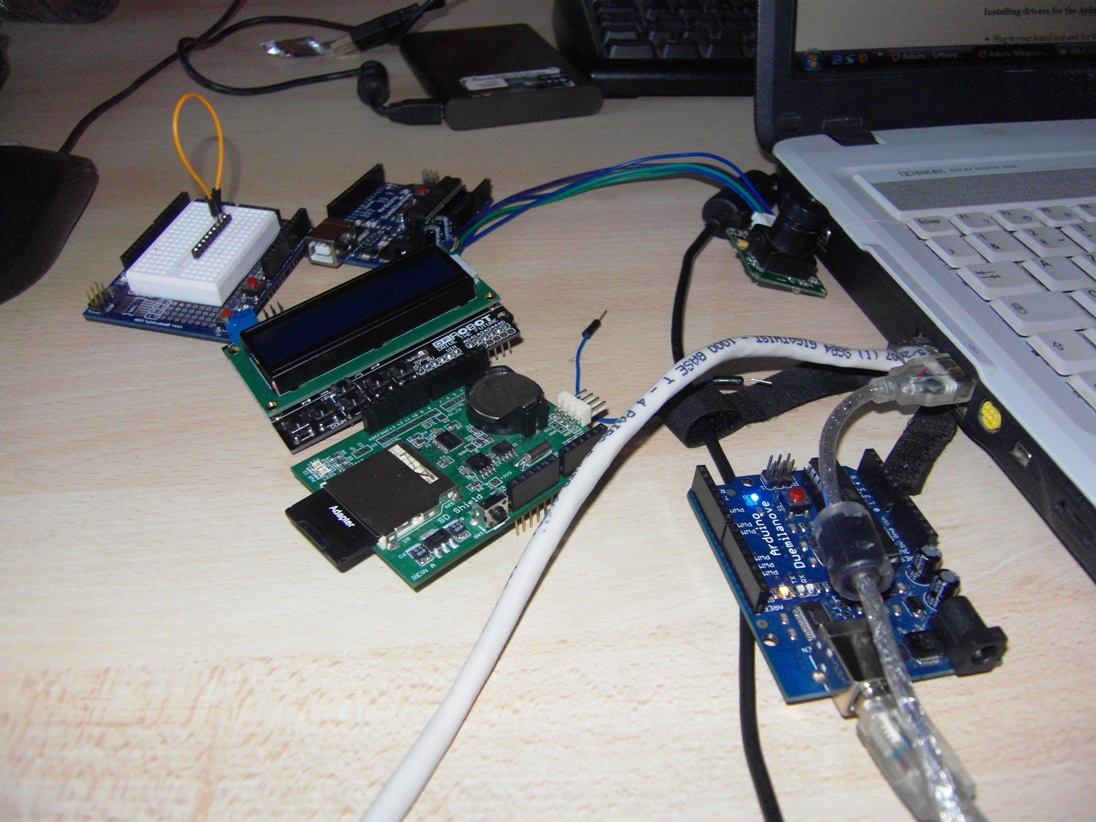
Aujourd’hui nous avons réussi à configurer les écran LCD et nous avons trouvé plein de programmes en open source ! Certain pour pour la camera, le module GSM (qui semble peu fonctionner), servomoteurs et même pour l’ensemble des modules branchés en séries ! Bref nous avons de plus en plus de clés en main, il nous reste à les maîtriser pleinement pour faire fonctionner notre montage...
La prochaine mission est de fabriquer la maquette du piège photo !

Ce soir nous avons fait une veillée « petit meurtre » ! Cela consistait à raconter une histoire en plaçant plusieurs mots bien définis dans notre discours... Afin que celui qui s’en démarque de trop se fasse découvrir par le détective, sous le regard avertis du maître du jeu.
Mercredi 8 aout 2012
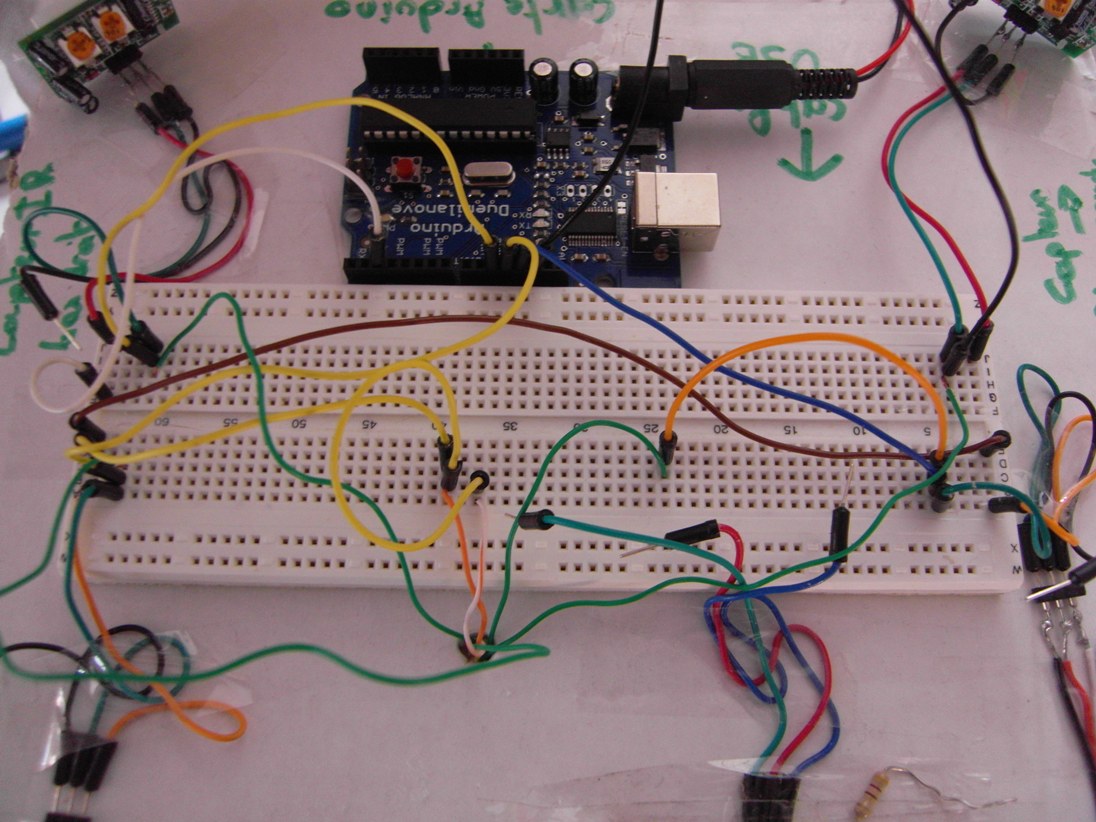
Ça y est nous avons commencé à monter le circuit électronique qui nous permettra de faire fonctionner le piège photo. Les capteurs Infra-Rouges sont installés et l’armature finale commence à prendre forme ! Il ne reste plus qu’à ajouter chaque modules...


Ce soir nous avons fait une veillée casino préparé par les ados !
Jeudi 9 aout 2012
Ce matin nous avons fait un point sur le rangement de la salle et sur le matériel puis nous avons effectué un bilan sur la première phase du projet ! Donc nous nous sommes bien familiarisé avec le langage Arduino, les composants électroniques ainsi que le potentiel de chaque module. Nous avons maintenant une vision plus précise du cœur du projet et chacun commence à maîtriser son rôle au sein de l’équipe.
Cet après midi une sortie au parc aventure nous a déporté de notre monde digital. Un peu d’évasion ! Nous avons donc passé le reste de la journée perchés dans les arbre a glisser sur des tyroliennes et a sauter de branches en branches. L’accro-branche était vraiment génial !



Oh tiens une soucoupe volante est en train d’atterrir sur la falaise en face !!!
Ah haah...
Ce soir, étant littéralement épuisés, nous avons regardé un bon film afin de se reposer le corps et l’esprit car demain, une grosse journée nous attend...
Vendredi 10 aout 2012
Ce matin nous avons inventorié le matériel afin d’envisager une éventuelle commande pour la semaine qui approche avec une équipe de SPIPers qui va s’agrandir !
Après manger nous avons préparé la Boum de ce soir puis nous avons fait chauffer nos fibres musculaires en courant après une balle, une petite session foot quoi !
Cet après midi fût une phase clé puisqu’elle consistait à compiler tout les algorithmes de programmation Arduino utilisés, et surtout découverts, jusqu’à ce jour sur un fichier txt. L’objectif étant de partager nos connaissances sur le journal de bord dans la même philosophie que le concept Arduino, en Open-source !!! Afin de capitaliser nos concepts pour l’avenir...
Faire clignoter une led :
/*
Clignotement de LED
Allume une LED pendant 1 seconde, puis l’éteint pendant 1 seconde
puis le programme se répète indéfiniment
Cet exemple est dans le domaine public
Traduction française par X. HINAULT - www.mon-club-elec.fr
*/
void setup()
// initialise la broche 13 en sortie numérique
// la broche 13 a une LED déjà connectée sur la plupart des cartes Arduino :
pinMode(13, OUTPUT) ;
void loop()
digitalWrite(13, HIGH) ; // allume la LED
delay(1000) ; // ne fait rien pendant 1 seconde
digitalWrite(13, LOW) ; // éteint la LED
delay(1000) ; // ne fait rien pendant 1 seconde
Faire clignoter un message sur un écran lcd :
// inclusion de la librairie LCD
#include <LiquidCrystal.h>
// initialise la librairie LCD avec les broches utilisées
LiquidCrystal lcd(12, 11, 5, 4, 3, 2) ; // mode 4 bits - sans RW
void setup()
// initialise le nombre de lignes et colonne du LCD
lcd.begin(16, 2) ;
// Affiche un message sur le LCD
lcd.print(« hello, world ! ») ;
void loop()
// Désactive le clignotement
lcd.noBlink() ;
delay(3000) ; // pause
// active le clignotement
lcd.noBlink() ;
delay(3000) ; // pause
Commander un servomoteur :
// --- Programme Arduino ---
// par X. HINAULT - 02/2010
// www.mon-club-elec.fr
// --- Que fait ce programme ? ---
/* Positionne un servomoteur à l’aide du clavier du PC - 10 positions
Utilise une interface processing de visualisation côté PC.
L’appui sur les touches HAUT/BAS incrémente/décrémente une variable processing
La valeur (de 0 à 9) est envoyée vers l’Arduino
Lorsqu’un caractère est reçu,
la position est calculée et le servomoteur est positionné
*/
// --- Fonctionnalités utilisées ---
// Utilise la connexion série vers le PC
// Utilise les servomoteurs
// --- Circuit à réaliser ---
// Connexion série entre la carte Arduino et le PC (utilise les broches 0 et 1)
// Connecter sur la broche 2 (configurée en sortie) la broche de commande d’un servomoteur. la broche de commande d’un servomoteur.
// Connecter les servomoteurs sur les broches de commandes utilisées
//**************** Entête déclarative *******
// A ce niveau sont déclarées les librairies, les constantes, les variables...
// --- Inclusion des librairies utilisées ---
#include <Servo.h> // librairie pour servomoteur
// --- Déclaration des constantes ---
const int POS_MIN=550 ; // largeur impulsion pour position 0° servomoteur
// POS_MIN=550 pour futaba S3003
const int POS_MAX=2330 ; // largeur impulsion pour position 180° servomoteur
// POS_MAS=2330 pour futaba s3003
// --- constantes des broches ---
const int broche_servo=2 ; //declaration constante de broche
// --- Déclaration des variables globales ---
// variable position du servomoteur en degré
int position_servo=0 ;
// variable de stockage des valeurs reçues
int OctetReception=0 ;
// --- Déclaration des objets utiles pour les fonctionnalités utilisées ---
Servo mon_servo ; // crée un objet servo pour contrôler le servomoteur
//**************** FONCTION SETUP = Code d’initialisation *****
// La fonction setup() est exécutée en premier et 1 seule fois, au démarrage du programme
void setup() // debut de la fonction setup()
// --- ici instructions à exécuter au démarrage ---
Serial.begin(115200) ; // initialise connexion série à 115200 bauds
// IMPORTANT : régler le terminal côté PC avec la même valeur de transmission
mon_servo.attach(broche_servo, POS_MIN, POS_MAX) ; // attache l’objet servo à la broche de commande du servomoteur
// ------- Broches en sortie -------
pinMode(broche_servo, OUTPUT) ; //met la broche en sortie
// ------- Broches en entrée -------
// ------- Activation du rappel au + interne des broches en entrée si nécessaire -------
// ------- position initiale du servomoteur
mon_servo.write(position_servo) ;
delay(200) ;
// fin de la fonction setup()
// ********************************************************************************
//*************** FONCTION LOOP = Boucle sans fin = coeur du programme *************
// la fonction loop() s’exécute sans fin en boucle aussi longtemps que l’Arduino est sous tension
void loop() // debut de la fonction loop()
// --- ici instructions à exécuter par le programme principal ---
if (Serial.available()>0) // si un octet en réception
OctetReception=Serial.read() ; // Lit le 1er octet reçu et le met dans la variable
OctetReception=OctetReception-48 ; // isole valeur numerique 0-9 à partir valeur ASCII
// calcule la nouvelle position
position_servo=map(OctetReception,0,9,0,180) ;
//positionne le servomoteur
mon_servo.write(position_servo) ;
//entre chaque changement de position
delay (200) ;
// fin gestion octet en réception
// fin de la fonction loop() - le programme recommence au début de la fonction loop sans fin
// ********************************************************************************
// --- Fin programme ---
... et ce soir c’était la BOUM !!!
Samedi 11 aout 2012
Ce matin nous avons fait un bilan de mi-séjour puis nous avons préparé les stands pour la retransmission.
Cet après-midi nous avons donc pu expliquer notre projet et le montage électronique.
Ce soir nous avons fait un casino avec des interludes spectacles ! C’était sympa de partager cette ambiance avec les quelques parents qui sont restés avec nous pendant la soirée !
Dimanche 12 aout 2012
Aujourd’hui nous avons fait une randonnée magique en direction du sommet de la falaise qui se trouve derrière le centre. On a eut de la chance car il a fait super beau ! Les photos parlent d’elles mêmes...







Et ce soir nous avons fait une veillée « aimes-tu tes voisins ? » pour apprendre à connaître les nouveaux arrivants.
Témoignages
Suivez notre actualité sur les réseaux sociaux :
